Abstract
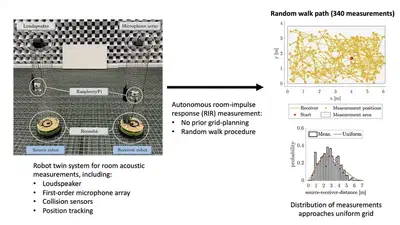
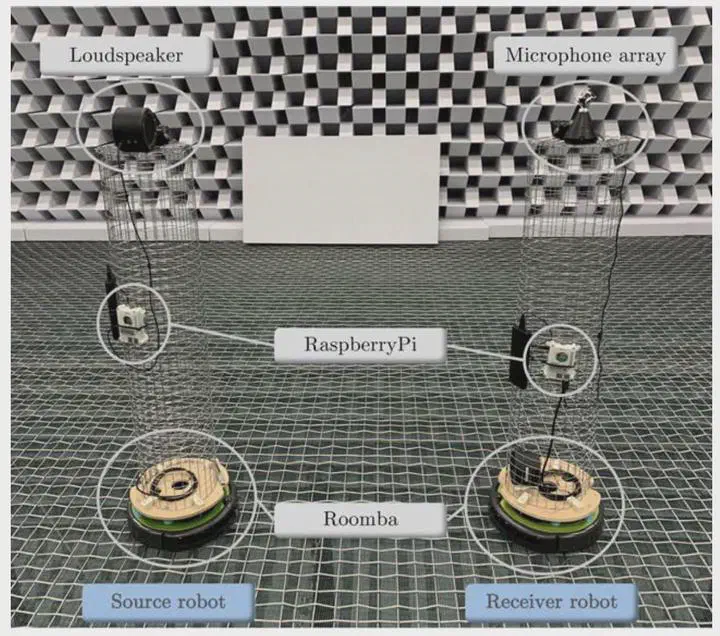
Whilst room acoustic measurements can accurately capture the sound field of real rooms, they are usually time consuming and tedious if many positions need to be measured. Therefore, this contribution presents the Autonomous Robot Twin System for Room Acoustic Measurements (ARTSRAM) to autonomously capture large sets of room impulse responses with variable sound source and receiver positions. The proposed implementation of the system consists of two robots, one of which is equipped with a loudspeaker, while the other one is equipped with a microphone array. Each robot contains collision sensors, thus enabling it to move autonomously within the room. The robots move according to a random walk procedure to ensure a big variability between measured positions. A tracking system provides position data matching the respective measurements. After outlining the robot system, this paper presents a validation, in which anechoic responses of the robots are presented and the movement paths resulting from the random walk procedure are investigated. Additionally, the quality of the obtained room impulse responses is demonstrated with a sound field visualization. In summary, the evaluation of the robot system indicates that large sets of diverse and high-quality room impulse responses can be captured with the system in an automated way. Such large sets of measurements will benefit research in the fields of room acoustics and acoustic virtual reality.